
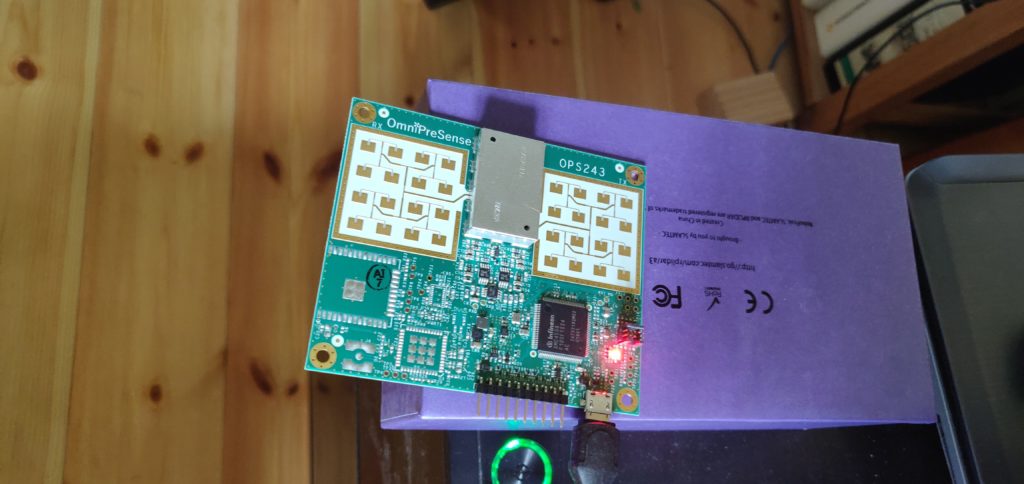
Im Zuge eines neuen Projektes wurde ein Dopplerradar der Firma OmniPreSense mit der Bezeichnung OPS243 angeschafft.
Technisch ist das hochinteresannt:
- Detektionsbereich 1-100m
- Geschwindigkeitsdetektion bis zu 348 mph
- Richtungserkennung ( kommend oder gehend)
Weitere Informationen sind hier zu finden: https://omnipresense.com/product/ops243-doppler-radar-sensor/
Standardmäßig sendet der Sensor seine Daten per serielles Interface heraus. Mit folgenden Einstellungen, lassen sich die Daten abzapfen:
/dev/ttyACM0 9600 8N1
Folgender Datenstrom ergibt sich:
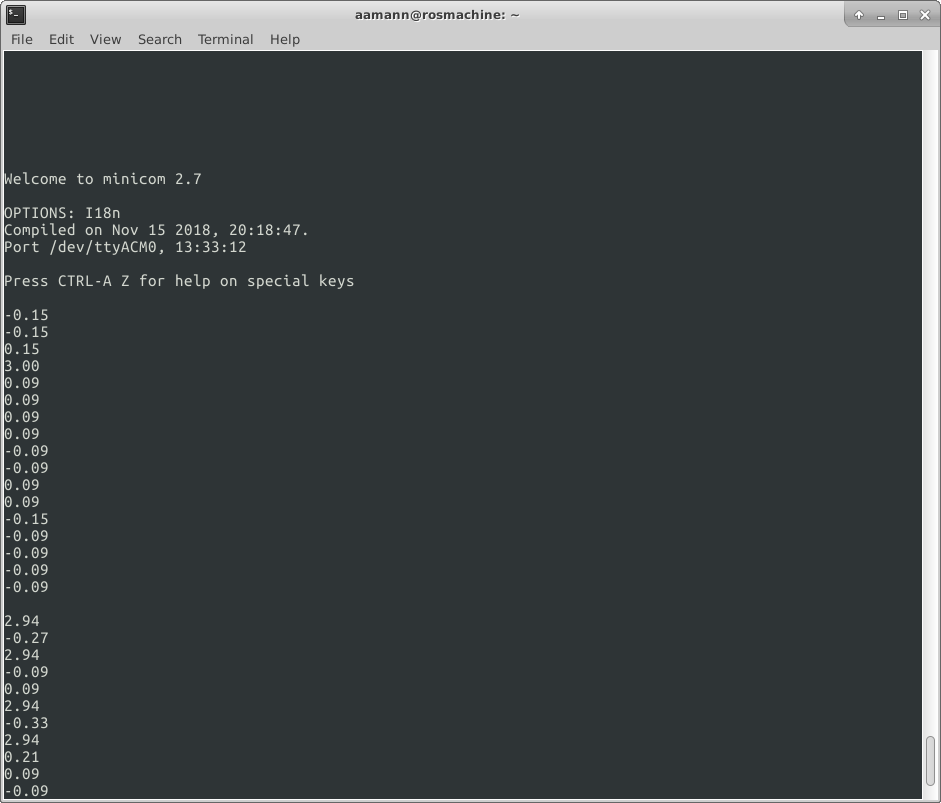
Die Ausgabestream gibt die Detektierten Objekte in m/2 an.
Nachdem dies nun zu funktionieren scheint, gilt es die Integration ins ROS zu vollziehen. Hierbei gehe zu http://wiki.ros.org/radar_omnipresense und folge der Installationsanweisung. Ich installiere das fehlende ROS Paket mit
sudo apt install ros-kinetic-radar-omnipresense
und nun kommt dier Erkenntnis, dass ich keine out of the Box-Visualisierung habe. Ich muss mich um was spezielles wohl kümmern.